

vysokonapěťový digitální displej 220V Nema42 krokový motor s uzavřenou smyčkou 12Nm
Řada NEMA42 Easy Servo (řada NEMA42 s uzavřenou smyčkou)
Elektrické parametry motoru:
| Režim | Krokový úhel | proud (A) | Odpor (Ω±10%) | Indukčnost (mH ± 20 %) | Přídržný moment (Nm) | Délka motoru (mm) | Kodér Rozlišení (PPR) | Použitelný ovladač |
| 110HCE12N-B39 | 1,2° | 4.2 | 1.2 | 13 | 12 | 139 | 1000 | 3HSS2260 |
| 110HCE20N-B39 | 1,2° | 4.2 | 1,88 | 18 | 20 | 221 | 1000 | 3HSS2260 |
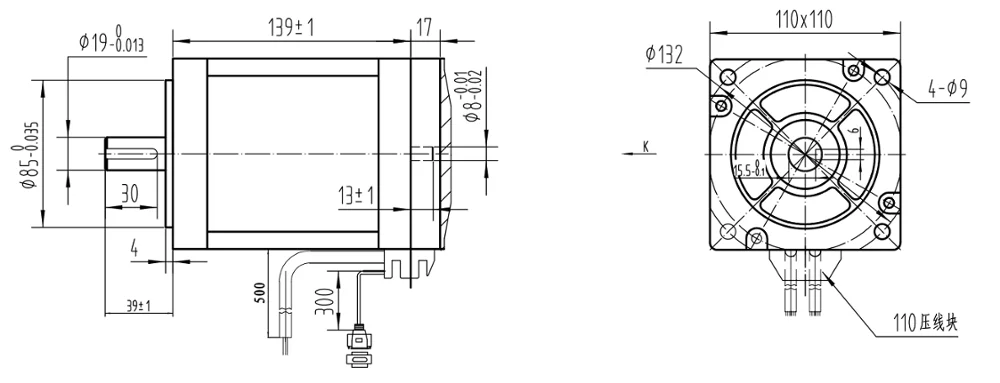
Rozměr motoru: mm
Křivka točivého momentu/frekvence
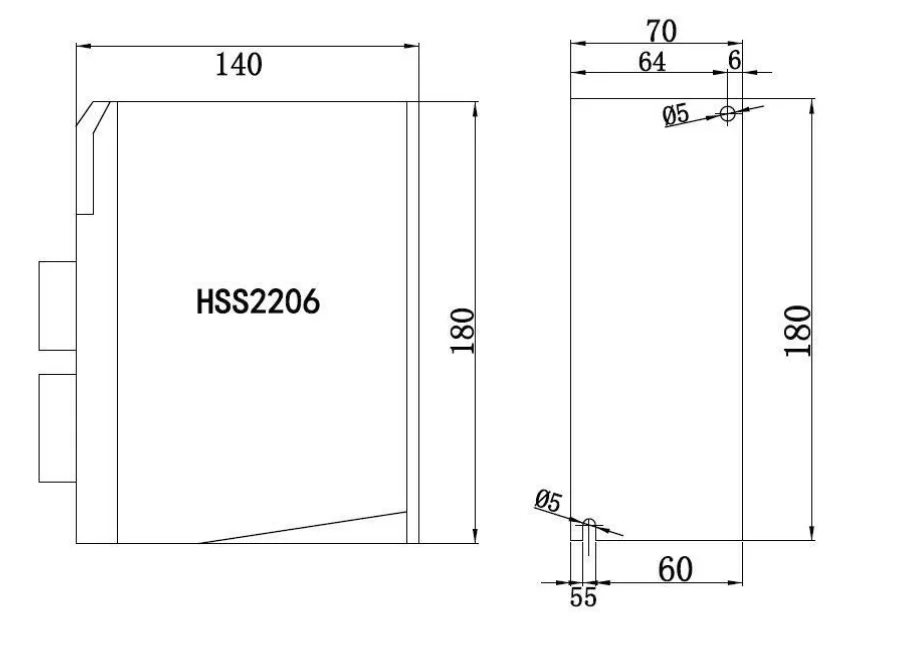
Ovladač 3HSS2260
Funkce
1, 32bitový DSP a vektorová technologie řízení s uzavřenou smyčkou
2, Bez ztráty kroku, vysoká přesnost v poloze
3, Zlepšete výstupní točivý moment motoru a pracovní rychlost
4, technologie řízení s proměnným proudem, omezení nárůstu teploty motoru
5, přizpůsobte se různým podmínkám mechanického zatížení (včetně řemenic s nízkou tuhostí), ne
potřeba upravit parametr zisku
6, Hladký a spolehlivý pohyb, nízké vibrace, velké zlepšení zrychlení a
zpomalit
7, Schopnost nulové rychlosti statické bez vibrací
8, přizpůsobte se 3fázovému hybridnímu servomotoru 86(NEMA34) a 110(NEMA 42)
9, Maximální frekvence krokového pulsu 200KHZ
10, Mikrokrok 400-60000 puls/ot
11, Rozsah napětí AC150-240V
12, Ochrana proti přepětí, přepětí a přepětí
13, Šest digitálních trubicových displejů, snadné nastavení parametrů a sledování chodu motoru
Stát
Výběr mikrokroků:
| Kód | Definice | Rozsah | Výchozí hodnota | Poznámka |
| PA0 | Číslo verze | 501 | Zakázáno měnit | |
| PA1 | Výběr režimu ovládání | 0~2 | 0 | |
| PA2 | Výběr typu motoru | 0~2 | 0 | |
| PA3 | Zapnutí displeje | 0~7 | 0 | |
| PA4 | Aktuální smyčka Kp | 0~1000 | 200 | Zakázáno měnit |
| PA5 | Aktuální smyčka Ki | 0~1000 | 300 | Zakázáno měnit |
| PA6 | Polohová smyčka Kp | 0~1000 | 300 | |
| PA7 | Nastavení mikrokroků | 400~60000 | 4000 | |
| PA8 | Rozlišení kodéru (1000) | 4000 | Zakázáno měnit | |
| PA9 | Rozlišení kodéru (1000) | 40~30000 | 1000 | |
| PA10 | Holding Current | 10~100 | 40 | |
| PA11 | Proud v uzavřené smyčce | 10~100 | 100 | |
| PA12 | Rezervace | |||
| PA13 | Rezervace | |||
| PA14 | Povolit Úroveň | 0/1 | 0 | |
| PA15 | Úroveň alarmu | 0/1 | 0 | |
| PA16 | Výběr pulzního režimu | 0/1 | 0 | |
| PA17 | Pulzní hrana | 0/1 | 0 | |
| PA18 | Směr otáčení motoru | 0/1 | 0 | |
| PA19 | Rychlost JOG | 1~200 | 60 | |
| PA20 | Sekce režimu PEND | 0/1 | 0 | |
| PA21 | Úroveň PEND | 0/1 | 0 |
Rozměr ovladače (mm):
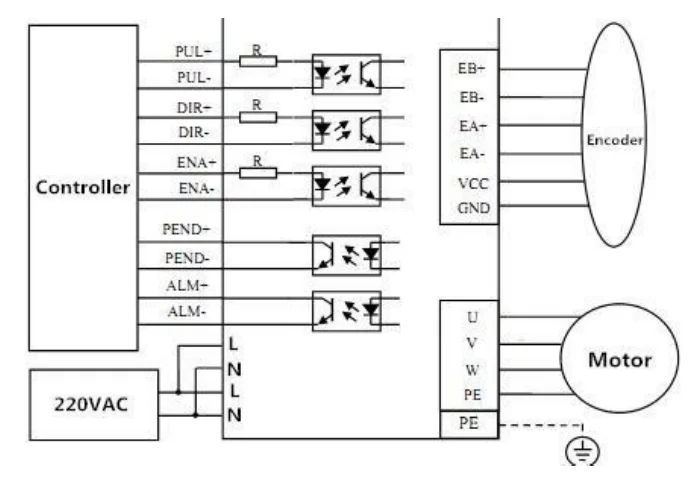
Elektrické schéma:



,planetary gearbox,worm gearbox,reliable and durable,suitable for all kinds of motors, such as dc motors ,servo motors and stepper motor,to get bigger torque")
